The Coppelia Project
|
The Coppelia
Project has been assisted by the Australia Council for the Arts, Arts
WA, The West Australian Ballet, and the many
generous contributors to its Idiegogo
crowd-funding campaign. See the Sponsors page for
details. The artist
says; 'I have always
been intrigued when watching Coppelia being
performed by a ballet company - one always sees
the most beautiful and graceful ballerina
"hamming it up" to move like a clunky robot
girl. I decided to add another layer of irony to
the situation my making a robot to imitate the
dancer who is imitating the robot... Of course,
robots are manufactured goods, not people,
so I had to make four. From the images below,
you may note an overtone of Fritz Lang's 1927
film masterpiece "Metropolis" and its heroine
"Maria". I am interested in such stories about
robots and automata that crossover into the
human realm. The Coppelia Project is about the
boundary conditions of humanity as it confronts
is technological alter ego. The robots are
robotic “blanks” that are energised by their
programming to mimic the elegant movements of
human dancers, but are imperfect in their
attempts at human grace.' The artist
explains further at his TEDx talk:
|
| Coppelia Dances |

|
 |
 |
Sponsors,
Doll Names
| The
Coppelia Project has benefited from the support
of a large cast of contributors and friends.
Clink on the link to
see the full list. As part of one of the
sponsorship packages offered in the Coppelia
Project crowd funding campaign, naming rights to
the four dolls have been allocated and the four
dolls are named: |
Coppelia Assembly



Robot
Capabilities
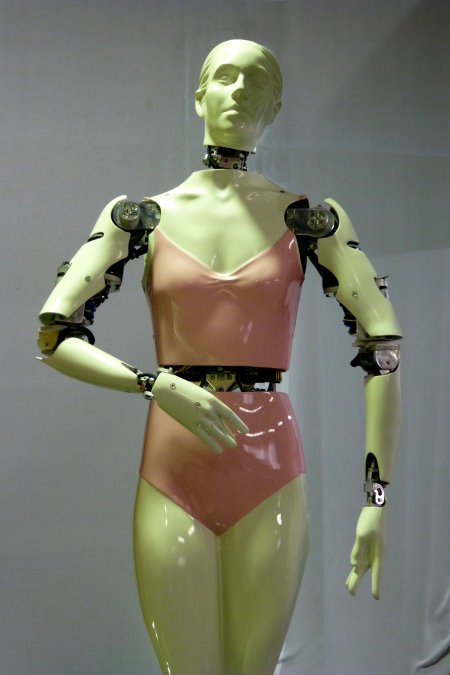
| The
Coppelia Project robots are specially designed
to learn and perform the movements of classical
ballet. They can spin “en pointe”, move their
waists, arms and head. They cannot walk and
their hands do not have grippers to pick things
up. They are optimised only as ballerina robots.
The Coppelia Project robots are taught ballet
movements by having their arms, head, and torso
physically moved through a ballet sequence by
our ballerina trainer. An on-board computer
captures the motion so it can replay it later -
in various dance move combinations. The Creation of the Coppelia Robots is the cumulation of an extensive research and development exercise undertaken with the assistance of Jayne Smeulders of the West Australian Ballet. Jayne was the model for the robots and assisted the artist while researching the requirements for ballerina form and movement. 
 |


Background
The
Coppelia Project is the ultimate outcome of a
series of increasingly complex robotics
projects, including "Floribots" (2005)
"Headspace" (2010) and "Totem" (2012). Two other
ballerina related projects have also taken place
alongside the Coppelia Project, one is “Parallax
Dancer” – a 3D virtual dance installation, and
the other is “Cockwork Jayne” – a simple windup
version of the ballerina robot. More detail on
these projects is available at the artists main
web
site.  |
Project Outcome
| The Coppelia Project will create a dancing robotic installation that will be exhibited as an interactive artwork installation, become the basis of Youtube video works for a worldwide audience, and eventually provide the foundation for a hybrid performance work - a new ballet written for robotic and human dancers. |
Future
Vision
|
The next stage for the Coppelia
Project is development of a hybrid
ballet/electronic stage performance that
blends interactive robotics and live dance
performance. The work will incorporate the
four “Coppelia Project” robot ballerinas and a
cast of human dancers in a new ballet that
extrapolates from the original 1870 production
“Coppelia” to explore visual, narrative, and
movement possibilities in the realm of machine
/ human boundaries - particularly as they
pertain to the emotional imperatives of the
“robot creator” and the sexual dynamics of
attraction between humans and machines. This project will encompass
choreography for humans and robots dancing
together, creation of sound and music to
accompany such performance, and dealing with
the technical, production, and staging
concerns required to deliver a performance
based on a blended cast of interactive robots
and live dancers. Read the Synopisis of the
Coppelia Project Ballet here. |
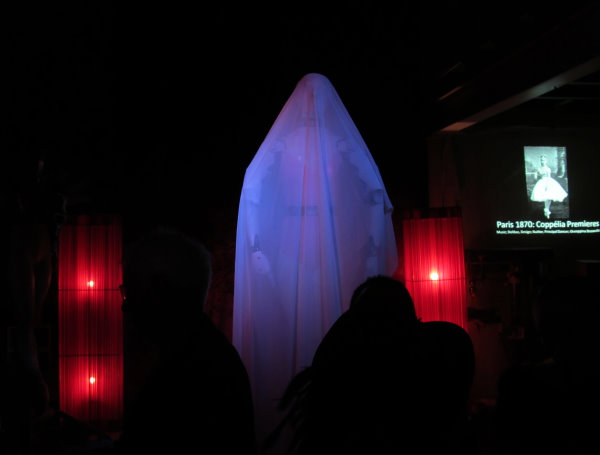
Coppelia
Launch Party
|
On Friday the 10th of May 2013 an
event "The Coppelia Salon" was held at
Geoffrey Drake-Brockman's studio in Nedlands,
Western Australia as the public launch of the
first Coppelia Project robot ballerina. 150
guests dressed in period costume witnessed the
robot doll dance on-stage to the music of
Delibes, with an introduction by dancers from
the WA Conservatoire of Classic Ballet,
specially choreographed by school principal
Beth James. The guest of honour was Jayne
Smeulders, who unveiled her robot duplicate in
front of the audience. The event was recorded
by a photographer from the West Australian
Newspaper.
|

 |
 |
 |
|
People I am Geoffrey
Drake-Brockman. I’m a full-time
professional artist, working primarily with
robotics, but also using lasers, and other
materials and technologies. I have a technical
background (BSc in computer science) and have
spent many years in the commercial world as a
programmer and as an IT Manager running
large-scale IT projects. I’ve also been to Art
School and done a Master of Arts degree. I
have been working as a full time artist for
the last seven years. My “paying” jobs are
generally public art commissions. I recently
gave a TEDx talk about my art practice you can
watch here.
Also on the Coppelia Project team we have:
|
|
Technology Here is a
summary of the main technology elements that
allow full reproduction of graceful human
dance movement in realtime:
|